An icon indicates that a published document is available for more details. An icon indicates that a video result is available.
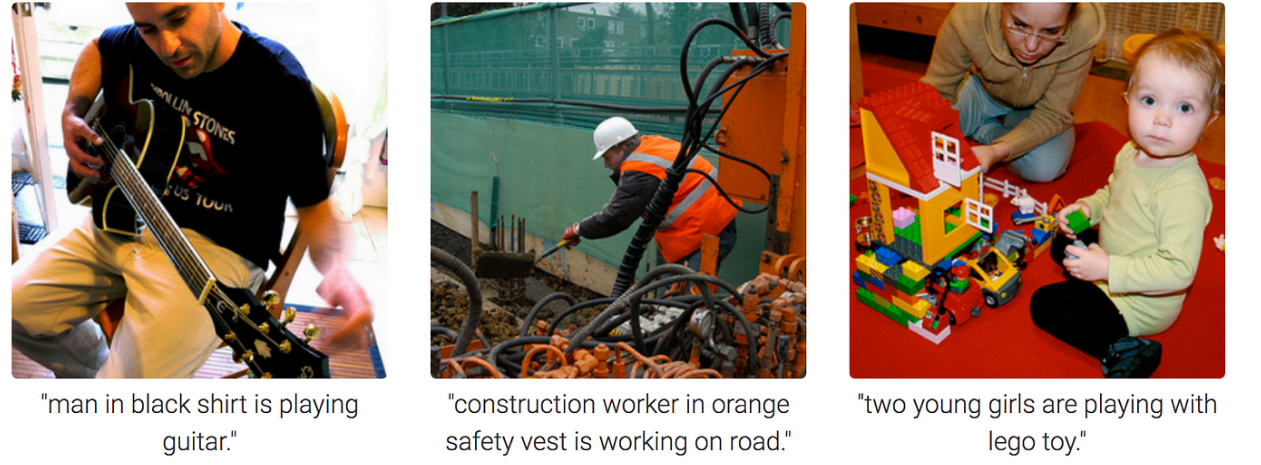
Implemented a deep learning approach using CNNs + LSTMs to caption images. Flickr8K dataset and InceptionV3 was used to caption the images.
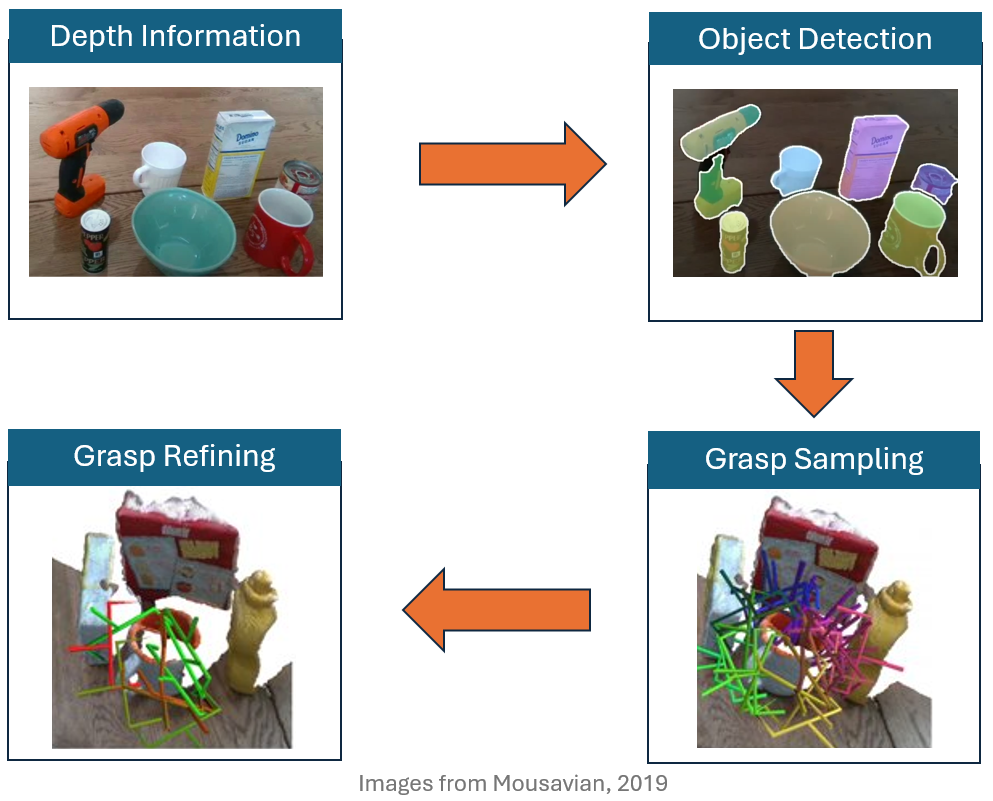
Implemented a deep learning-based approach for generating a 6-DOF grasp configurations using a CNN. The method enabled robots to grasp diverse objects with robust grasps for object manipulation.
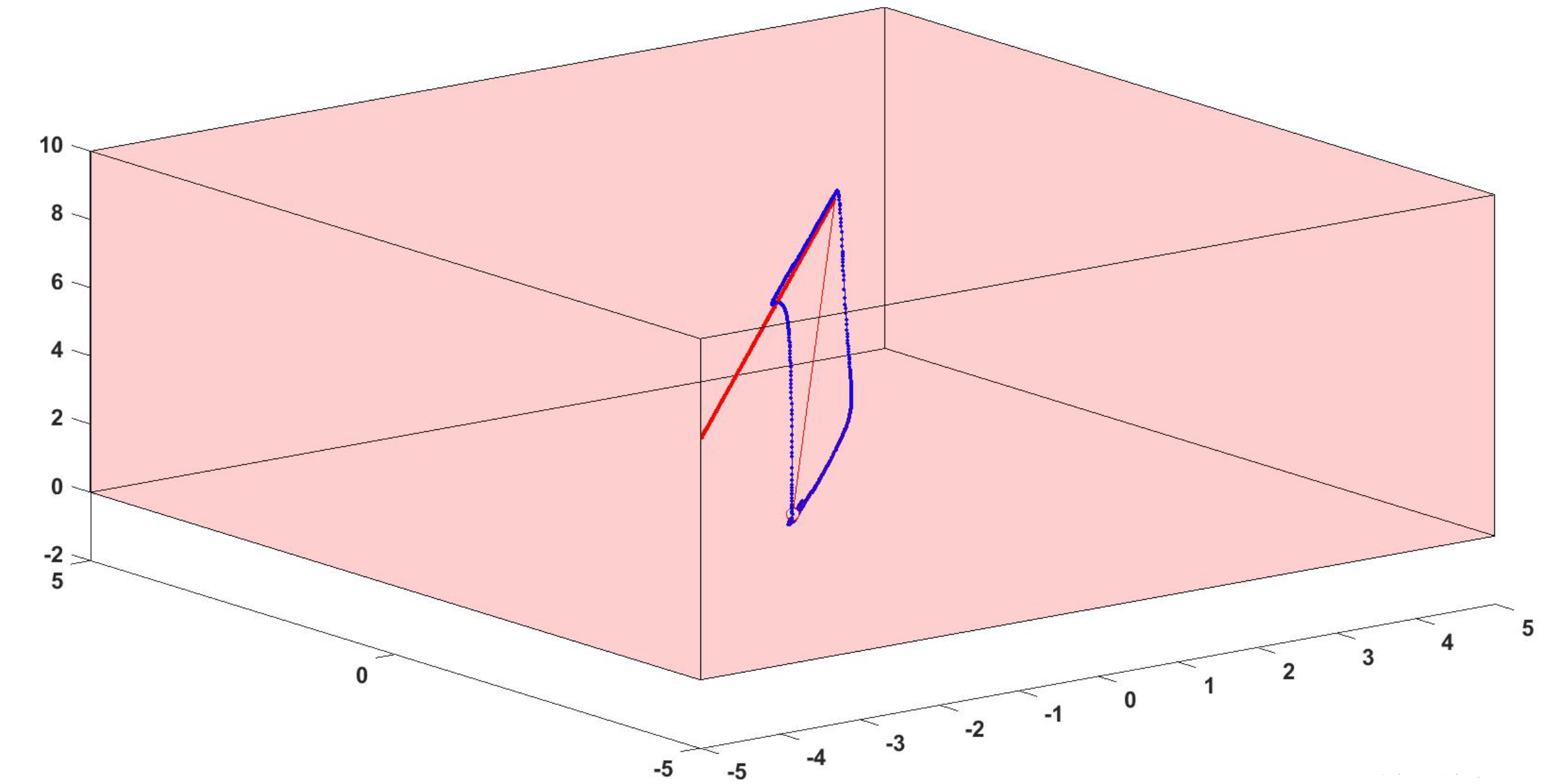
Designed a controller that can operate in restricted airspace. Completed objective to fly and capture an unknown aerial vehicle and then return to the base.